超高齢社会を支えるサービスロボット動向
近年、我が国では少子高齢化による人手不足やサービス部門の生産性向上という課題が顕在化しており、国策としてロボット革命実現会議参考1が設置される等、ロボットの社会実装を加速化させる動きが活発化してきています参考2。ロボットは大きく産業用ロボットとサービスロボットに分類されますが、特にサービスロボットについては超高齢社会を支えるデバイスとして期待されています参考3、4、5。
サービスロボットが生活空間へと広がり、人間の生活を支えるインフラとしての役割が期待されていくと、ロボットには状況に合わせた高度な判断が求められるようになります。しかしながら、ハードウエアやコストなどの制約によりロボット単体の処理では限界が訪れると考えています。
ロボットAI=センシング+コンテキスト・アウェア・コンピューティング
ロボットが状況に即したタスクを自律的に実行するには、高度なコンテキスト認識を実現する必要があります。昨今では、人感センサーや離床センサー等の環境設置型のセンシングデバイスが小型化、高性能化、低コスト化してきていることに加え、バイタルデータを計測するウェアラブルデバイスが市場投入され、人の状態を手軽にセンシングすることが可能となってきています。しかしながら、こういったセンシングデータを用いて高度なコンテキスト認識を行うロボットAIを成形していくにはいくつかステップが必要です。
- Step1.M2M基盤を活用したセンサーデータ収集
- Step2.大規模データ分析によるコンテキスト認識
- Step3.コンテキスト認識結果に基づく判断
- Step4.判断結果に基づくロボット制御
このように多様なセンシングデータとコンテキスト認識により、ロボットの機能を拡張し、高度な状況判断と状況に合わせたサービスの提供を実現することが可能となっていきます。この仕組みはNTTデータが考えるクラウドロボティクス基盤参考6の核となる要素です。ロボットAIの成形にはさまざまな要素技術を組み合わせたインテグレーション能力が求められます。
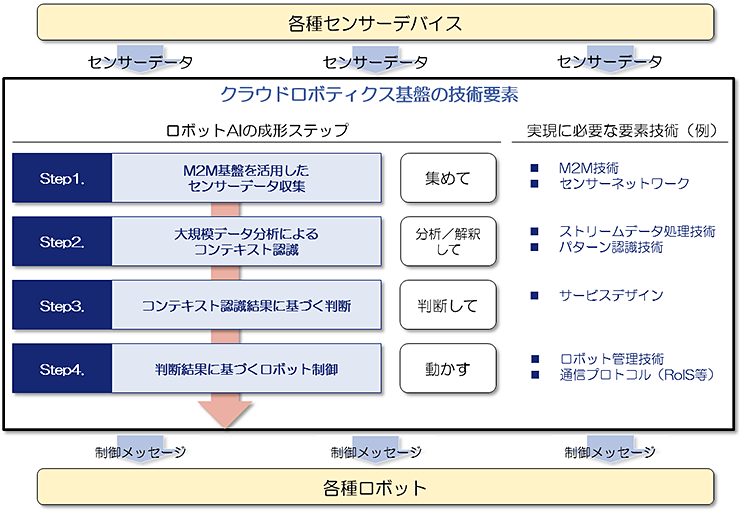
図1:ロボットAIを実現する仕組み~クラウドロボティクス基盤~
NTTデータの考える高齢者の自立生活を支えるロボットサービス例
高齢者を支援するロボットサービスとして、次世代モビリティによる移動支援やテレプレゼンスロボットによる社会参加支援等、さまざまなサービスが期待されていますが、これらのロボットサービスの実現には、人やロボットとの協調のための複数センサーデータによる状況認識や物体認識等が求められ、前述のクラウドロボティクス基盤の仕組みが必要となります。
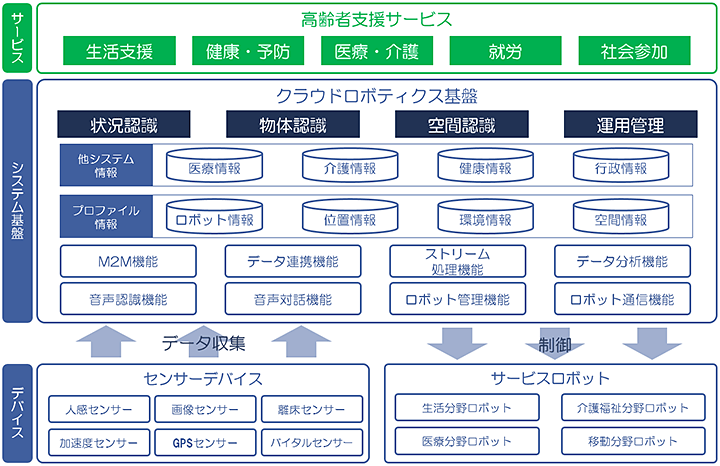
図2:ロボットを活用した高齢者支援システムモデル例
コミュニケーションロボット参考7を活用したロボットサービスを考えてみます。
例えば、居室空間に設置した人感センサーや離床センサー等のセンシングデータにより認識した高齢者の状況をコミュニケーションロボットに伝えることで、状況に応じた声掛けや応答が可能となります。これにより、能動的な状況確認が可能となり、安否確認や服薬管理等、高齢者の自立生活を支援するサービスが提供できるようになります。さらに、EHR(Electronic Health Record:診療記録等の医療記録)活用基盤参考8やPHR(Personal Health Record:個人の健康情報)活用基盤等とのデータ連携により、予防や早期異常検知等の個人に応じたきめ細かいサービスが提供可能となります。
高齢者支援以外にも、インフラ保守等の社会課題の解決や2020年の東京オリンピックに向けたスマートシティづくり等に向けて、NTTデータはロボットやセンサー等デバイスとクラウドロボティクス基盤を連携させることで新たな仕組みの構築を進めます。
参考文献
- 参考1ロボット革命実現会議(外部リンク)
- 参考2NEDOロボット白書2014(外部リンク)
- 参考3ロボット技術の介護利用における重点分野(改訂版)(外部リンク)
- 参考4介護ロボットポータルサイト(外部リンク)
- 参考5スマートプラチナ社会推進会議(外部リンク)
- 参考6社会実装に向けたロボット技術
- 参考7コミュニケーションロボットは、介護施設等で認知症高齢者向けのレクリエーションやうつ予防等に利用され始めています。近年、ICTシステムと通信を行うネットワーク型コミュニケーションロボットが製品化され、対話データの収集やユーザーに対しフィードバックを行うユーザーインターフェースとしても期待されています。
- 参考8日本版EHR事業推進委員会(外部リンク)