
- 目次
社会が求めるのは、レベル4の自動運転
昨今、話題に上がることが多い自動運転だが、実はレベル0~5までの6段階に分かれていることはご存じだろうか。レベル0は、自動運転技術がない状態。レベル1は、システムがアクセル・ブレーキ操作またはハンドル操作のどちらかを部分的に行う状態。レベル2は、システムがアクセル・ブレーキ操作またはハンドル操作の両方を部分的に行う状態。ここまでは、運転支援車とされ、運転操作の主体はドライバーにある。
レベル3は、決められた条件下で、全ての運転操作を自動化するが、ドライバーはいつでも運転に戻れなければならない。これは、条件付自動運転車(限定領域)と呼ばれ、運転の主体はシステムだが、システム非作動の場合はドライバーが主体となる。日本の自動車メーカーからもレベル3を謳う運転支援技術を搭載したクルマが販売されているが、基本的には高速道路や自動車専用道路を前提としたものだ。
レベル4は、決められた条件下で、全ての運転操作を自動化する。運転の主体はシステムだ。2023年4月1日には改正道路交通法が施行され、一般の普及に先んじて、公道走行が解禁された。そして、レベル5になると、条件なく全ての運転操作が自動化される、完全自動運転車となる。
現在、喫緊の導入が求められているのは、一般道におけるレベル4の自動運転である。その理由のひとつが、過疎化による公共交通機関の減少や高齢化による高齢ドライバーの増加である。これは密接に関連しており、国交省がおこなった「居住地における将来的な不安について」のアンケート結果では、5万人未満の市町村で「公共交通が減り自動車が運転できないと生活できない」という回答が44%を超えた。このような社会課題の解決へ向け、NTTデータ オートモビリジェンス研究所 先端研究部(以下、ARC AL)でも、レベル4の自動運転による「誰もが自由に移動できる社会の実現」をめざしている。
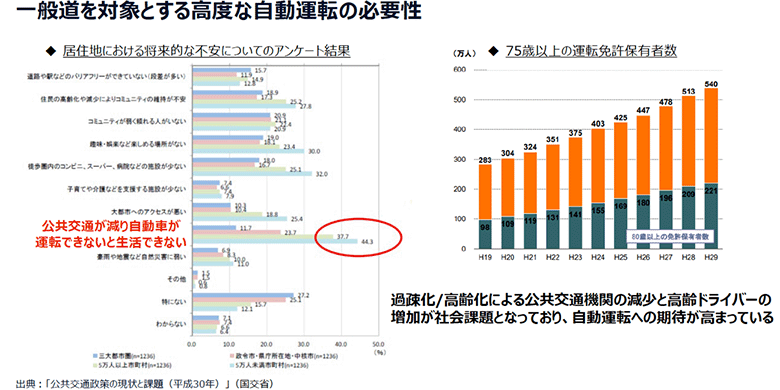
図:レベル4の自動運転が求められる社会背景
「レベル4の自動運転と一口にいっても、走行する範囲やユースケースはさまざま。それぞれに応じたやり方で、実証実験が進められています」と語るのは、ARC ALの寺尾恭範だ。
「車同士の通信を使って先頭の自動運転車を追従する『トラック隊列走行システム』や、信号などの道路構造物にカメラやリモートセンシングを設置して情報を補完するインフラ協調型、走行範囲の高精度な地図の活用など、実証実験の方法は多岐に渡ります。ただし、一般道における自動運転では、自動運転車が単体で複雑な周囲の環境を認識して、AIが自らの行動を決定する自律型であることが不可欠。もちろん、ARC ALもその開発に取り組んでいます」(寺尾)

図:レベル4 自動運転の事例
NTT DATAは、自動運転社会の早期実現に向けて、インフラ協調型+自律型の開発研究を進めている。インフラ協調型では、エッジコンピューティングを活用して信号機などの交通インフラの制御情報をクラウドに送信。クラウドからクルマに渡すことで、自律型では検知できない情報を補完している。しかし、インフラ協調型は高度な自律型があってこそより効果を発揮することができる。自動車メーカーをはじめ多くの企業が自動運転の実現に取り組んでいるが、「インフラ協調型+自律型」というコンセプトはNTT DATAグループの強みと言えるだろう。その中でARC ALは、自動車メーカーに勝るとも劣らない自律型の研究開発を進めているのだ。
一般道での自動運転が抱える3つの課題
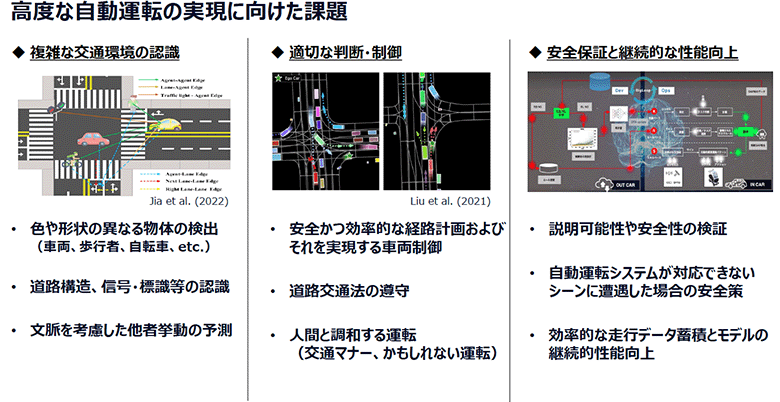
もちろん、その挑戦は簡単なものではない。高速道路と異なり、歩行者や自転車、バイク、他のクルマが混在し、信号や交通標識、緊急車両にも対応しなくてはならない一般道は、走行環境として最も複雑な部類に入る。そのような一般道におけるレベル4の自動運転を社会実装するには、『複雑な交通環境の認識』、『適切な判断・制御』、『安全保証と継続的な性能向上』といった、3つの難しさがあるという。
「『複雑な交通環境の認識』では、自分がどのような環境にいるのかを正しく理解することが不可欠です。『適切な判断・制御』は、他者に危害をおよぼさないことを大前提に、行きたいところへ適切なルートで、道交法を重視しながら、譲り合いなど人間と調和した臨機応変さも求められます。そして、『安全保証と継続的な性能向上』では、難しい場面でも最低限の安全は保障し、かつ次回にはさらに適切な行動をとれるように改良していくシステムが求められます」(寺尾)
『複雑な交通環境の認識』では、すでに現状でも、複数のセンサーで取得したデータを効果的に処理して高度な外界認識を達成している。難しいのは、『適切な判断・制御』と『安全保証と継続的な性能向上』だ。
たとえば、センサーが他車と信号を認識して、法律に基づいて運行を進めても、実際の道路では法律を守らないドライバーも存在する。臨機応変な事態に対応できなければ、安全性は担保できない。安全でなければ一般道で実証実験は難しく、データの収集も進まない。それは即ち、社会実装に向けた安全保証の手法について議論が進まず、『安全保証と継続的な性能向上』も不十分になるということだ。
こういった課題を解決するために、ARC ALが提唱した手法が『SEAS』である。
一般道での自動運転実現へ、新たなコンセプト『SEAS』
『SEAS』は、Sustainable Engineering Autonomous Systemの頭文字を取ったもので、日本語では「持続可能な自動運転システムの開発を可能とするエンジニアリング」となる。その全体像は、以下の図解を参照して頂きたいが、大まかに、運用(Operations)と開発(Development)に分けられる。
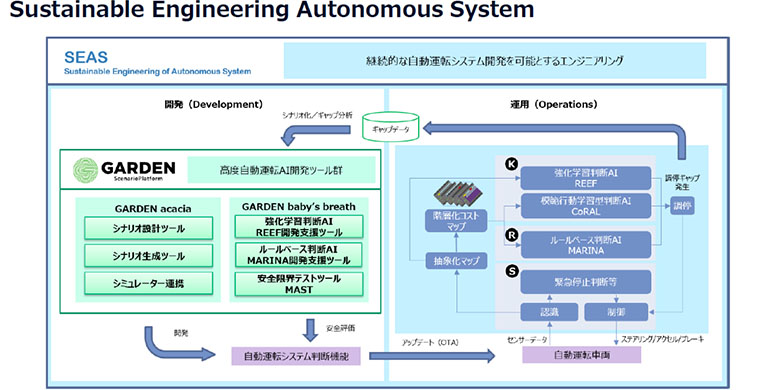
図:SEASの全体像
運用でめざすのは、強化学習とルールベースを組み合わせた『Hybrid AI』による想定外の状況で判断できる自動運転の実現だ。そして開発では、自動運転を用いた効率的なデータ収集によって、自動運転自体の性能を継続的に向上させる。加えて、これらの開発手法と効果的な安全保証の手法も公開し、一般道におけるレベル4の自動運転の社会実装を急ぐ。本稿では、運用を中心に話を進めていく。
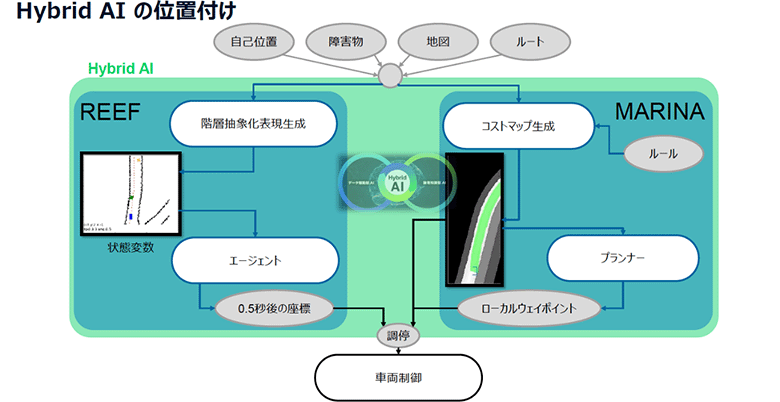
寺尾は、「SEASの運用は、ルールベースのAIである『MARINA(マリーナ)』と強化学習のAIである『REEF(リーフ)』、そして、二つのAIを統合し、最終判断を下す『HybridAI』を組み合わせています」と語る。
『MARINA』は「道路交通法に基づいた運転の判断」を、『REEF』は「不測の事態にも対応する運転の判断」を担当。『Hybrid AI』はこれら二つのAIを統合し、状況に応じた『適切な判断・制御』を下すという。
『MARINA』と『REEF』、それぞれの仕組みを詳しく説明する前に、デンマークの認知科学者、J・ラスムッセンが提唱した『SRK理論』に触れておこう。これは、人間が情報を得て行動するまでのパターン理論で、緊急時の情報処理におけるヒューマンエラー対策でも参考にされている。
運転に当てはめると、『SRK理論』のSはSkill Baseで、繰り返し運転してきたことで、体に染みついた、高度に統合化されている無意識の感覚運動制御にあたる。RはRule Baseで、信号や標識、他車ウインカーなど、過去の経験と学習によって獲得したルールによる意識的制御だ。KはKnowledge Baseで、これまでに培ってきた知識で予測運転をするなど、不慣れな状況でも目的達成にむけた高次元な概念レベルでの制御である。
Sに関しては、さまざまなセンサーが取得した情報を認識して、ステアリングやアクセル、ブレーキなどを制御する仕組みがすでに実用化されている。前方車両への衝突や飛び出しに対しての衝突被害軽減ブレーキなどはそれにあたる。AIによる判断が必要になるのが、RとKだ。Rについては『MARINA』、Kについては『REEF』が担うことになる。
AIによる「かもしれない運転」の可能性
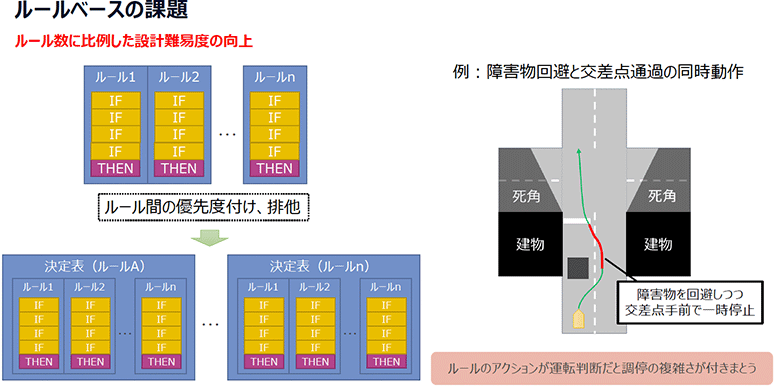
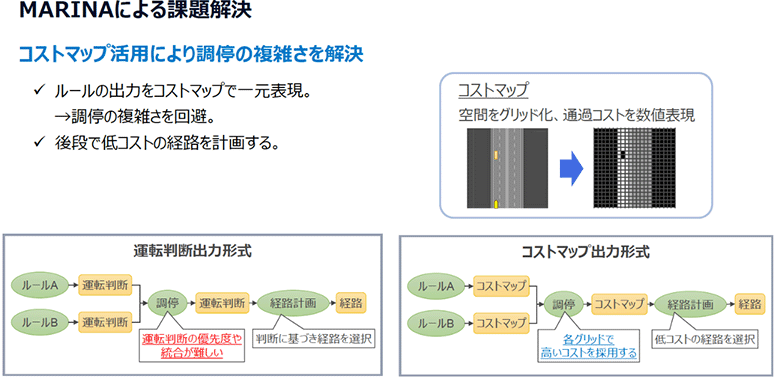
「『MARINA』は、複雑な交通状況下において、道路交通法を明確に遵守するためにルールベースで判断するAI。道路交通法という形式知をルール化して、運転判断をします」と語るのは、開発を担当する小西浩之。ルール数が増えるほど設計難易度が向上するという課題を持つルールベースにおいて、階層化コストマップ(障害物のある領域を数値で表現した格子状の地図)を用いることで効率的なルール設計を行い、そのルールに従いながら自動運転を行うという。
「一般道では、譲り合いや不測の事態など、高度な判断が求められる場面も多い。それらは、『REEF』などの強化学習系AIが担うようになるでしょう。しかし、強化学習系AIは、AIの判断の理由を人が説明できない、いわゆるブラックボックス化という課題もあります。一方、ルールベースAIは、判断の説明が可能です。道交法など明確な基準があるものは、『MARINA』のようなルールベースで判断する模範行動学習型AIを実装するのが望ましいと考えます」(小西)
一方、『REEF』は、市街地で想定される実際の運転を強化学習で学ばせたAIだ。ChatGPTが強化学習によって、より人間らしい、自然な回答を可能にしたように、自動運転でも、より人間らしく、周囲の交通状況と調和する自動運転制御判断を行う手法として有効活用できる可能性が高いという。
強化学習とは、細かいルールなど手本となるデータ、いわゆる教師データを必要とせず、AI自身が環境、ここでは道路状況などをもとに、試行錯誤を繰り返しながら方策を学習する手法だ。しかし、安全性が担保されていないレベル4の自動運転車を一般道で走行させられない。そこで採用したのが、コンピューターシミュレーションである。
開発を担当した泉名克郎は「シミュレーターと学習エージェントが、環境(実際の道路状況)に対して、試行錯誤しながら、どういった行動を取れば最善の結果を得られるかを探索し、良い行動を覚えていきます。たとえば、その良い行動のひとつが、人間でも難しい、“かもしれない運転”です。『REEF』が完成すれば、人間が考えるような運転行動や判断を獲得でき、経験に基づく“かもしれない運転”を獲得できる可能性が示唆されました」と実世界への応用を期待する。
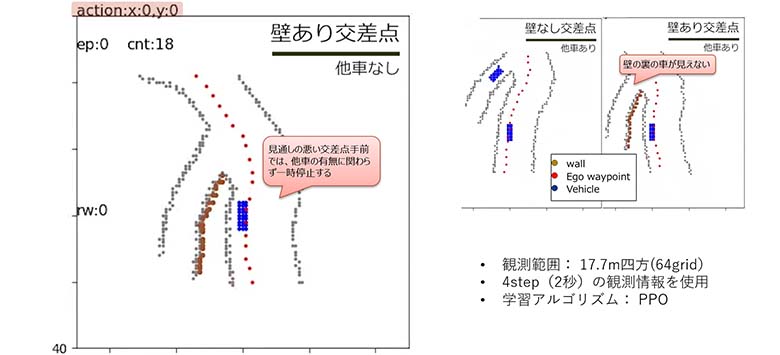
図:シミュレーターで示唆されたREEFによる「かもしれない運転」の兆候
『MARINA』と『REEF』、二つのAIの判断を受けて、最終的な判断を下すのが、『HybridAI』だ。開発に携わるリン ジンズゥは、このように語る。
「『MARINA』と『REEF』は、それぞれに長所と短所があるので、単独で使用する場合は、性能限界や安全性能で不安が残ります。そこで、ARC ALは『MARINA』と『REEF』の両方を搭載する自動運転を研究しているのですが、両方とも判断系AIなので、自動運転車両は、どちらの判断に基づいて制御するのか迷ってしまいます。そこで、二つの判断系AIを調整して、最終判断を下すAIが必要になります。それが『HybridAI』です」(リン)
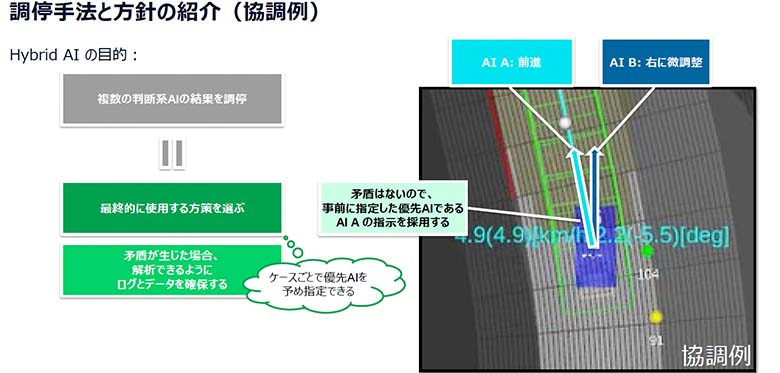
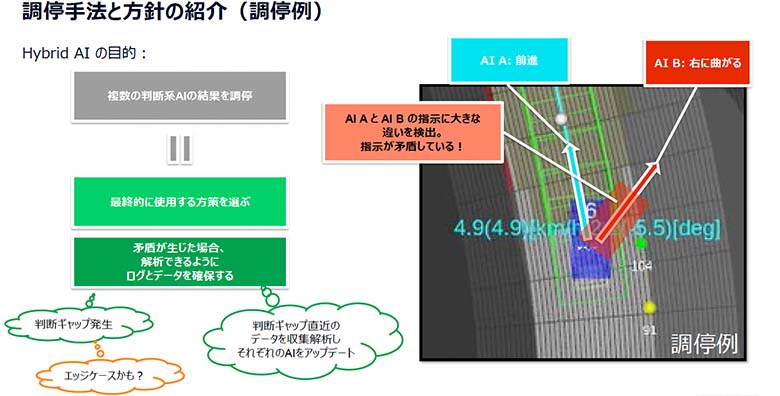
『HybridAI』が下す判断には、「協調」と「調停」がある。協調の事例は、AI(1)が前進、AI(2)が右に微調整という判断を下したときだ。基本的には前に進むという制御に矛盾はないので、事前に優先AIとして指定されているAI(1)の判断を優先する。調停の事例は、AI(1)が前進、AI(2)が右に曲がるという判断を下したときだ。判断ギャップが生じたときには、想定外の出来事に遭遇したエッジケースとして周囲のデータを再度、収集解析し、それぞれのAIの判断をアップデートして『HybridAI』が最終的な判断を下す。いずれの場合も、今後の判断精度向上や説明責任を果たすために、なぜ矛盾が生じ、どういった基準で判断を下したのかを解析できるようにログとデータを確保するようにしている。
『MARINA』、『REEF』、『Hybrid AI』を搭載した実車での実証実験は、2022年から始まっている。実際に走らせると、環境に存在するノイズの違い、ハードウェアの不安定性、機械の個体差など、多くの課題も判明してきた。シミュレーションで採用した手法を複雑に改造したり、調整したりすることで、自動運転システムのAIが成長できるよう、研究と実験を重ねる必要があり、社会実装や実車からのデータ収集に関しても前向きに活動を展開していくという。
持続可能なシステムにより「誰もが自由に移動できる社会」の早期実現へ
冒頭、SEASは運用と開発に大別されると記した。持続可能な自動運転システム開発を可能とするアーキテクチャの実現をめざすには、運用で培った知見やギャップを開発で解消し、さらに良い運用に活かすという循環が必要だ。そこで、開発では『GARDEN』という仕組みを構築し、そこで得られたノウハウを自動運転システムの開発環境『GARDEN baby's breath』として公開している。
『GARDEN baby's breath』では、『MARINA』、『REEF』の開発支援ツールと『MAST(Methods of Automated Safety/Scenario Testing)』を提供。『MAST』は安全限界テストツールで、一般道におけるレベル4の自動運転を社会実装する難しさのひとつ、『安全保証と継続的な性能向上』に寄与する。
一般道におけるレベル4の自動運転は、さまざまなメーカーがチャレンジをしている。その実現には、膨大なデータや超高性能なGPUを備えたコンピューター、莫大な電力を使った演算が必要だと思われている。しかし、SEASは強化学習とルールベースの判断ギャップが生じた時だけデータ転送・保存することで通信コストやストレージコストを削減することができる。このような、効率的に判断系AIを育てていく持続可能なシステムにより、想像よりも早く、安価で、「誰もが自由に移動できる社会」を実現できるかもしれない。

NTT DATAが考える自動車業界の変革と新市場のホワイトペーパーはこちら:
https://www.nttdata.com/jp/ja/-/media/nttdatajapan/files/industries/mobility/mobility_wp.pdf
NTTデータ オートモビリジェンス研究所の詳細はこちら:
https://www.zipc.com/jp/
あわせて読みたい: