「歩行現象」は、気象現象と同じように「自然現象」である
佐野明人(さの・あきひと)/名古屋工業大学 電気・機械工学専攻教授。
1987年岐阜大学大学院工学研究科修士課程修了。1992年博士(工学)(名古屋大学)。現在、名古屋工業大学大学院工学研究科電気・機械工学専攻教授。2002年スタンフォード大学客員研究員。受動歩行・走行、歩行支援、触覚・触感などの研究に従事。2009年「世界で最も長く歩いた受動歩行ロボット」でギネス世界記録認定。2014年9月、無動力歩行支援機『ACSIVE(アクシブ)』を実用化。ACSIVE・aLQに関連して、第29回中日産業技術賞(特別奨励賞)、グッドデザイン賞、計測自動制御学会システムインテグレーション部門学術業績賞の各賞を2015年度に受賞。また、2018年度全国発明表彰21世紀発明奨励賞を受賞。2010・2011年度日本ロボット学会理事、2015・2016年度計測自動制御学会理事、2016年度科学研究費補助金複合領域委員会委員などを歴任。日本機械学会フェロー、日本ロボット学会フェロー。
重力だけを利用して歩き続ける「受動歩行ロボット」
───受動歩行ロボットとはなんでしょうか?
受動歩行ロボットとは、人間の歩行と同じように膝を曲げて歩くロボットです。重力を利用して歩き、モーターなどの動力は一切必要としないのが特徴です。ロボットに動きを指示するプログラミングさえ必要としません。私たちが何もせずとも、重力を使って歩き続けるのです。しかもその動き方は、モーターを搭載したロボットよりもきれいです。
受動歩行ロボットの学術研究は、1990年に始まりました。カナダのサイモンフレーザー大学の研究者であるタッド・マクギア博士が受動歩行ロボットを初めて製作したのがきっかけです。
マクギア博士はもともと航空工学を専門としていた研究者で、その発想の根本には飛行機がありました。飛行機は動力を積んで飛びますが、一方でグライダーや紙飛行機はそういったものなしに風に乗って滑空します。この点に注目したマクギア博士は、グライダーのようにシンプルな方法で歩行し続ける仕組みを研究することにしたのです。その実験結果は衝撃的なものでした。なにしろ、動力を搭載しないロボットが、重力だけを使ってスロープを歩き続けることができていたからです。
私は当時、モーターを使ってロボットを歩かせる研究をしていたのですが、マクギア博士の実験映像にはとても感動しました。その実験では、受動歩行ロボットは、四本の足が二組ずつ動くものでした。また、転倒の回数もとても多かった。その後研究が盛んになり、いまでは、私の研究室で開発している受動歩行ロボットは27時間歩き続けることができるまでに進化しています。
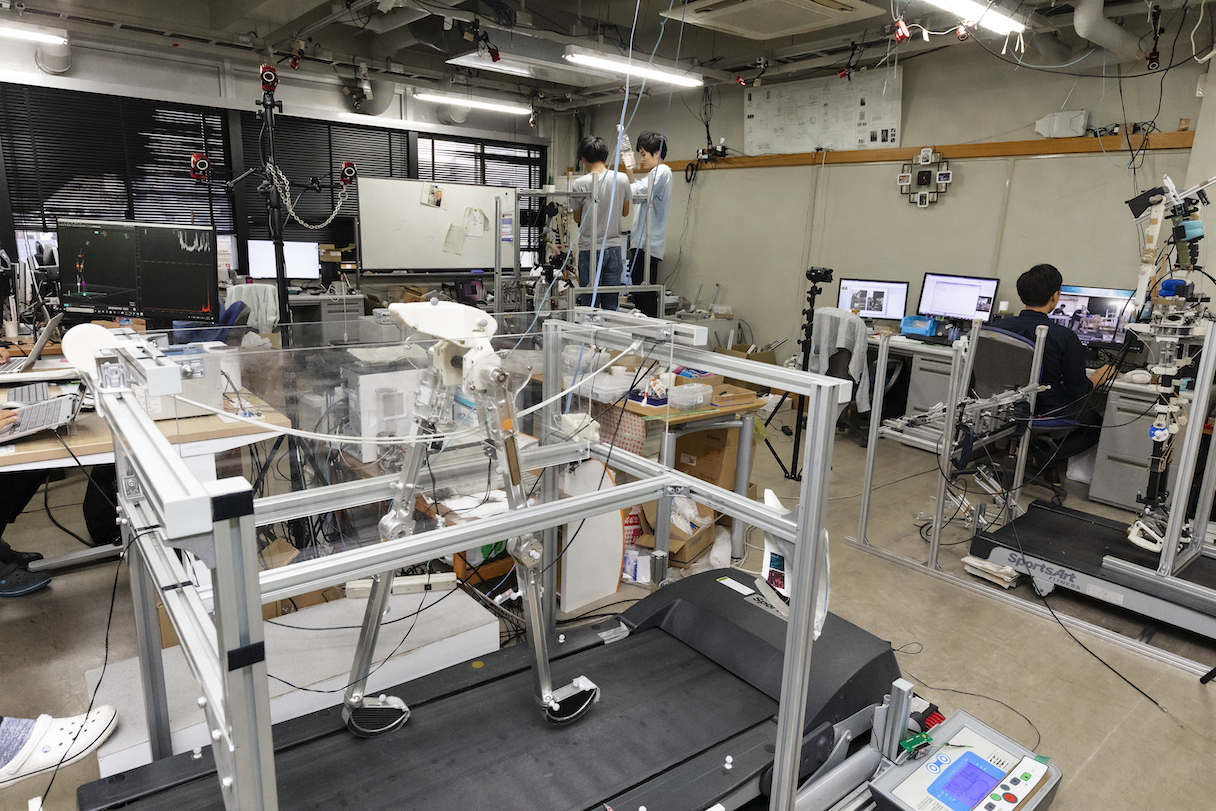
提供:名古屋工業大学 佐野明人教授
───ロボットが「歩く」ということについて、大きな発想の転換があったのですね。
そうです。それまでのロボット開発では、「ロボットは人間が動かすもの」という考え方が当たり前で、ロボットをいかに思い通りに動かすかに焦点が置かれていました。それは現在でも変わらず、プログラミング教育はその最たるものです。しかし、マクギア博士の受動歩行ロボットは、ロボットと人間の関係の新たな可能性を示しました。私は、自分自身がロボットをモーターやプログラムで思い通りに動かそうとしていた立場でしたが、以来、「ロボットは、本当はもっと違う歩き方や動き方をしたいのではないか?」という観点を持つようになりました。
受動歩行ロボットは、重力だけを使って私たちが何もしなくても歩きます。ちょうど私たちが歩くときにぼんやりしながらでも自然に歩いているのと同じように。ここで何が重要かというと、往々にして意識的な行動だと考えられる歩行が、実は生命体に限られた現象ではないということを受動歩行ロボットが示している点です。歩行とは行動というよりも、重力によって起きる一種の自然現象だと私は捉えていて、だからこそ歩行を「歩行現象」と呼んでいます。右足を一歩前に出せば左足が地面から離れる歩行現象は、生命・非生命に関係なく起きる単なる物理現象なのです。人間はうまくその物理現象を取り入れて、重力を活用して歩いているとも言えます。
ロボットに肌で触れ、ロボットの声を聞く独特の実験環境
───歩行が物理現象であるという観点は刺激的ですね。研究の現場では具体的にどのような方法をとっていらっしゃいますか。
私たちの研究室の特色のひとつは、ロボットと実際に触れ合う時間が長いことでしょう。受動歩行ロボットにはプログラミングが搭載されていません。なので、最初の一歩を踏み出させるときには、人間が手を添えてやらないといけないのです。学生たちは声をかけながら受動歩行ロボットを歩かせます。最初に手を添えておくのですが、バランスが取れ始めるとロボットはまったく勝手に手元から抜け出て、スタスタと歩き始めるんです。その時、まるで命が吹き込まれているような感じさえするんですよ。転倒するたび学生たちは手を添えてこの作業を繰り返します。そうすると不思議なことに、自身の手肌を通してロボットの調子の良し悪しが感じられてくる。

私たちはこのようにしてロボットの調子を感じ取りながら、ロボットが動きたいようにサポートしています。無理矢理動かすのではなく、ロボットが「手を放していいよ、もう歩けるから」と言っていると感じられるときに手をすっと放す。私たちはロボットと触覚を通してコミュニケーションをしているわけです。これはプログラムを作って意のままに制御するのとはまったく違うロボットとの接し方です。
人間とロボットの距離がごく近い実験環境をあえて作っているのにも理由があります。これまでの機械工学は人間を排除する形で、機械にのみ注目して進んできたところがあります。しかしこれからは、人間と共存する機械を作っていかねばなりません。そのとき、人間の感覚こそ大切にしなければならないのです。
受動歩行研究を人間の歩行機能の改善に役立てる
───受動歩行ロボットの研究の課題はなんですか。
歩行の安定性をあげることですね。受動歩行ロボットの研究は基礎段階で、現在では一日以上歩き続けることができるようになったとはいえ、まだ条件によっては転倒します。平面を歩くのも得意ではありません。私たちが目下取り組んでいるのは転倒回数を減らすことです。受動歩行ロボットにも、人間とおなじように調子の良し悪しがあって、調子が悪いと転んでしまうのです。
このような側面があるので「ロボットに歩かせる必要はない。移動目的なら胴体の下に車輪をつければよい」という意見ももちろんあります。しかし私は受動歩行の奥深さに惹かれています。というのも受動歩行の研究を通して、物理現象としての歩行にまつわる原理の部分、人間の歩行にも当然共通する部分がより具体的に見えてくるからです。どのようにしてロボットの歩行を改善することができるかがわかれば、今度は人間の歩行機能の改善にフィードバックできるという大きな利点があります。
受動歩行の発想が人々の歩行を支援
受動歩行研究が歩行支援機を生んだ
───受動歩行のご研究の成果が社会に還元され始めていますね。開発なさった歩行支援機について教えてください。

アクシブ(右足用)を持つ佐野教授
「ACSIVE(アクシブ)」は、歩行に困難を感じられている方々に使用していただいている歩行支援機です。受動歩行ロボットでの研究の成果を役立て、電気やモーターといった動力を使用しないため、重量も550グラムと軽く、装着に負担がありません。受動歩行ロボットと同じバネを使用して、歩行の際の足の振り出しをサポートする仕組みです。自分の歩くエネルギーのうち一部をバネに貯めて、振り出しの際に使うことで歩行を支援します。
決して大げさな器具ではありませんが、歩行感覚を大幅に改善します。使用するのにトレーニングがいらないのも利点です。つけた瞬間からいつも通りに歩くだけなのに歩きやすさがぐっと増すのです。使用してくださっている方々からは、装着した途端にその良さを感じられたと驚かれるとともに「歩きやすくなって人生そのものが明るくなった」「前向きになることができた」といった声もいただいています。研究者としてとても嬉しい瞬間です。
───どんな方に向いていますか?
アクシブは脳卒中などでの片麻痺の方々が多く利用してくださっています。また、「aLQ (アルク)」はもっと多くの方々に使っていただけるよう開発した歩行支援機で、加齢などによる歩行機能の低下や、階段や段差に苦労をなさっている方々にも向いています。旅行やハイキングにご利用になられる方もいらっしゃいます。歩いて移動するときに、自分の身ひとつではなく、この器具を装着することで楽になります。仕組みはアクシブと同じです。
アクシブもアルクも、重力をうまく活用する歩き方をサポートします。従来の歩行支援の代表的なものとして思い浮かぶのは、杖や装具ではないかと思います。これらは「支える」「固定する」というイメージが強い器具ですね。しかしアクシブやアルクは、支えるというよりも「動かす」「揺らす」ことを支援するイメージです。
杖などの支える歩行支援は、重力によって転倒するのを防ごうと支えることに重点を置きます。もちろん、転倒し骨折するような事故は避けなければなりませんが、「支える」ことに過度に力点を置くと、こんどは柔軟に動けない状態になります。一方、受動歩行ロボットの発想が根底にあるアクシブとアルクは、重力を味方につけて振り子のように足をぶらぶらとうまく動かすことに重点を置いています。だから歩きやすいのです。身につける負担も少なく、動力も自分の歩行エネルギーですから、環境にやさしいです。
シンプルな仕組みほど、社会に役立つ
───歩行支援機の発想の鍵となったのはなんですか?
アクシブを着想したころ、パワーアシストが市場に出はじめていました。パワーアシストは動力を積み、人間の筋力を増強させるという考え方。それに対して、無動力でアシストができないかと考え、アクシブを開発したんです。
アクシブもアルクも、仕組みのシンプルさに驚かれることが多いです。研究において私がもっとも興味を持っているのは、原理の解明です。原理とは唯一、真理に近いもの。そしてシンプルなもの。受動歩行の研究で解明されつつある歩行の原理はまさにシンプルで、「こんなに簡単なことだったのか!」という驚きを人々に与えます。
シンプルなものほど応用の可能性が高く、技術開発との親和性も高い。つまり簡単な仕組みほど社会に役立てるうえで有益だと思います。アクシブはそのよい例でしょう。
───ロボットの研究をなさっているようで、常に貫かれているのは人間や人間社会への視点ですね。
私はある意味で常に人間に関わる研究をしているのです。アクシブを装着したとたんにうまく歩けるようになり、笑顔いっぱいで喜んでくださる人々を前にしているときなど、私は人間の素晴らしさや人間が備える力の大きさを感じます。日々そういった場面に触れていると、自然とそこで得た感動に根ざした研究になってきます。人間の肌感覚でロボットと触れ合い、ロボットの声に耳を傾けることも重視しているのも、そこに理由があります。

受動歩行ロボットをご覧になった多くの方々が「人間みたいだ」「生きているようだ」という感想をお持ちになります。私は人間に似せようと思っているわけではないのですが、自然の原理を取り込んで自然な動きを作ると、結局は自然と人間らしくなってきます。受動歩行ロボットを追求していくうちに、人間のひとつの特徴である二足歩行の原理に肉薄できるようになってきたということだと思います。
受動歩行研究が目指す未来
───人間とロボットの間に、歩行という現象を通して橋を架けたとも言えるかもしれませんね。
そうですね。歩くことが阻害されると、人間のアクティビティは下がってしまい、人生の質にも影響が出てしまう。歩くことの大切さや歩けることの幸せについて、話題にならない日はないのではないかと思うほど、歩くことは人間にとって根本的な活動だと考えています。だからこそ、歩行という現象は奥深い。この研究を続けることによって、今後もなんらかの社会的還元ができればと思います。いつの日か、どんな人でも装着できて誰もがより歩きやすくなるような器具を開発できたらと願っています。
───今後、受動歩行の研究ではどんなことを目標とされていますか?
まずは受動歩行ロボットのクオリティを上げ、転倒の回数を減らし、3日間歩き続けられるようにすることです。
また、機械学習を取り入れて、ロボット自身が自分で調子の良し悪しを判断できるようにしたいですね。自然現象としての歩行現象と、人工物としてのAIという両極端なものを組みあわせることに取り組んでいます。受動歩行とAIを結びつけた研究は世界でもあまり例がありませんので、面白い結果が出るのではと期待しています。
研究室では現在、走るロボットの研究も続けています。東京オリンピックに向けて、42.195キロメートルを2時間を切るスピードで走れるようにするのが私たちのいまの一つの目標なんですよ。これから2年かけてブラッシュアップし、ロボットに聖火ランナーをさせてもらえたら、というのが夢のひとつです。